Ok, so in this post I will present the *proof *that Jano has requested. Having done so, I remind him that he then agrees with all 12 statements I made in post #127.
I hope that Jano (and Tomdstone if he’s still following along) appreciate the inordinate effort that I have put in to educate Jano. Creating this post has not been the work of five minutes as CAF does not render LaTex and so I have to make and host images of the maths and then get these into the post.
Let’s start. The first thing to be noted is that the acceleration of a body is defined unambiguously as a change in the velocity vector of that body. In other words, if the velocity can be described as an analytical function of time, then you can calculate the acceleration as a function of time by differentiating the velocity with respect to time. OK so far?
The same thing of course is true for velocity - the velocity is defined as the change in the position vector as a function of time and the velocity can be calculated as a function of time by differentiating the position with respect to time. So, if you have an analytical function for the position of a body, you can calculate its velocity and acceleration. OK?
Let’s look first at the ball B1 (this also applies to the body on the end of the string) and I’ve tried to stick to the same notation as Jano does to avoid confusion:
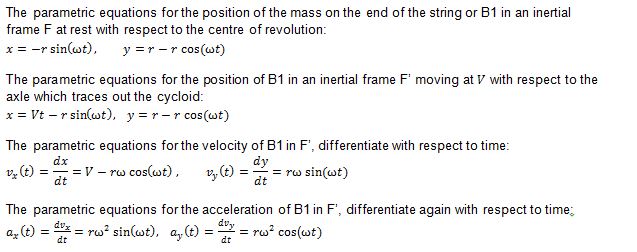
So the key thing to inspect here are the equations for acceleration - they tell us exactly the acceleration of a body moving in a circle around a point as seen from an inertial frame moving at velocity V in the plane of the circle. The first thing that you notice is that the acceleration does not include V - in other words the acceleration of such a body is
the same in
all inertial frames - it is independent of V. (This result holds for all inertial frames not just for frames moving in the x-direction - the velocity of the inertial frame, being constant, always disappears in the equations for acceleration.)
Then consider the form of the equations for acceleration - they are the parametric form of a circle centred on the origin, 180 degrees out of phase with the circle describing the position of B1 - in other words, the vector for acceleration always has the same amplitude (r*omega^2), and always points to the centre of the circle.
This is true regardless of the value of V. QED.
In truth, we are done here - we have proven that the acceleration of B1 is a[cp] and there is no a[ct] observed in any inertial frame. However, I’ll create and post some more later tonight or tomorrow, drawing out some more detail about the scenario that includes B1 and B2, eg specifically calculating the work done on those two bodies.


